
线性代数本质(9)--基变换

Mathematics is the art of giving the Same name to different things。
正如庞加莱所说,数学是一门赋予不同事物相同名称的艺术。
9.0 总结
❤️❤️❤️ A^{-1}MA 暗示一种数学上的转移作用,中间的矩阵 M 代表一种标准坐标系下常见的的变换(旋转变换,剪切变换等); A^{-1},A 代表转移作用,也就是在不同于标准坐标系与标准坐标系之间进行转换, 实际上也是视角上的转化。矩阵乘积代表着同一种变换,只不过是从别的坐标系的角度来看。
❤️❤️线性变换依赖于所选择的基。
为了方便理解,将总结前后copy了一份,与9.5章节的内容保持一致。
9.1 基本假设
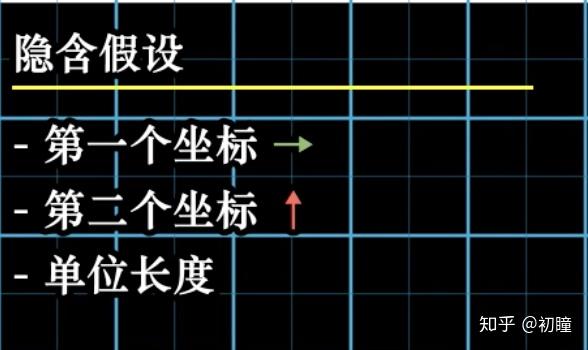
我们前面提到的缩放、线性变换等,都有一个基本的假设前提: ①第一个坐标 \rightarrow ② 第二个坐标 \uparrow ③单位长度

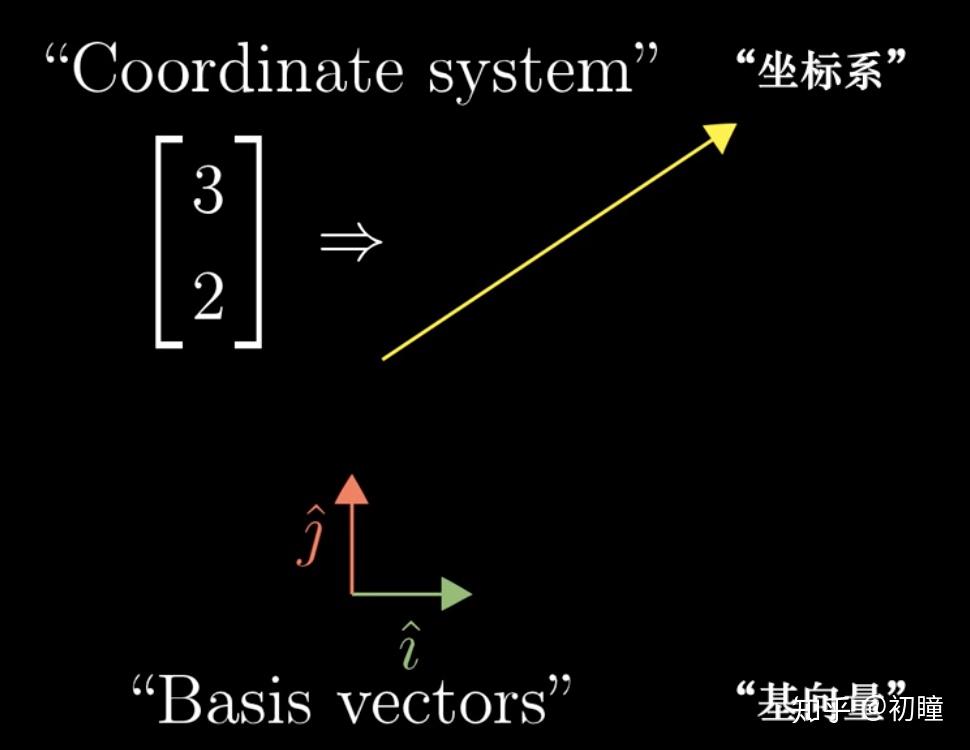

发生在向量与一组数之间的变换,都被称为“坐标系”,在此基础上会存在一组基向量。 其中图中的 \vec{i},\vec{j} 称为标准坐标系下的基向量。
假设二维空间中使用另外一个非标准基 \vec{b_1},\vec{b_2}, 特别的,两个坐标系原点的定义是一致的。\vec{i},\vec{j} 坐标系下的向量\begin{bmatrix} 3\\ 2 \end{bmatrix} 在非标准基 \vec{b_1},\vec{b_2}就变成了 \begin{bmatrix} 5/3\\ 1/3 \end{bmatrix} 。
9.2 向量在不同坐标系下的表示
如果在 \vec{b_1},\vec{b_2} 的坐标系下,将向量 转化为到 \vec{i},\vec{j} 坐标系下
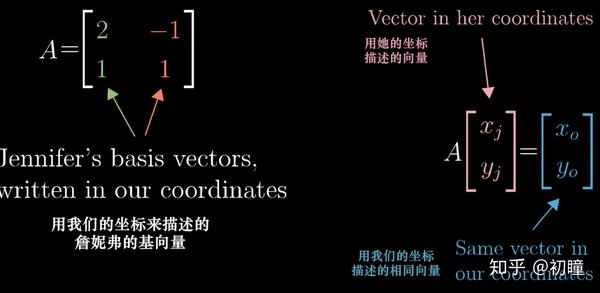
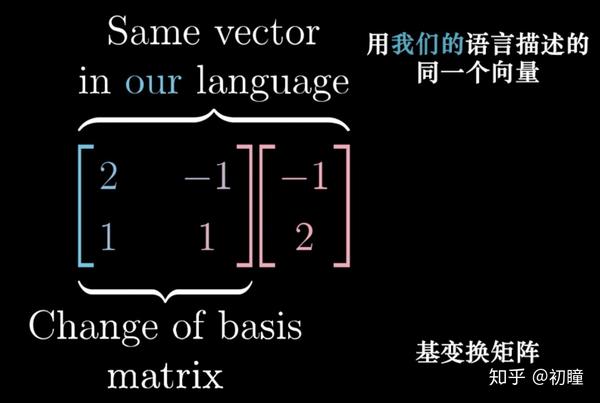
- 首先来看,\vec{b_1},\vec{b_2} 在 \vec{i},\vec{j} 坐标系表示的结果为 \vec{b_1}=(2,1),\vec{b_2}=(-1,1)
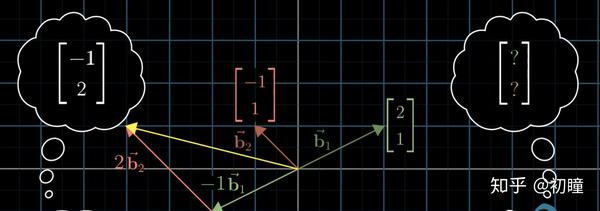

- 在此基础上,我们将 \vec{b_1},\vec{b_2} 基坐标系下的\begin{bmatrix} -1 \\ 2 \end{bmatrix} 用 \vec{i},\vec{j} 坐标系表示的结果是: (用某个向量的特定坐标与它的基坐标进行数乘,然后将各个维度求和)
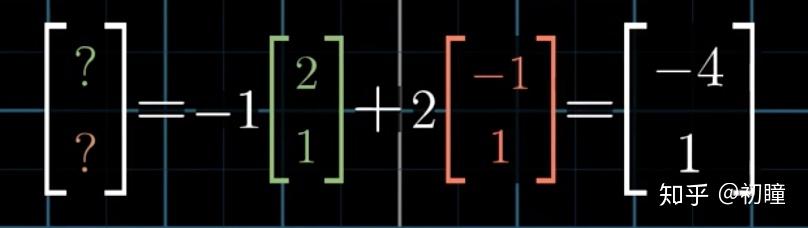

- 进一步,因为是线性变换,所以将其转化为矩阵乘法,矩阵的列是 \vec{i},\vec{j} 在变换到 \vec{b_1},\vec{b_2} 后的位置:
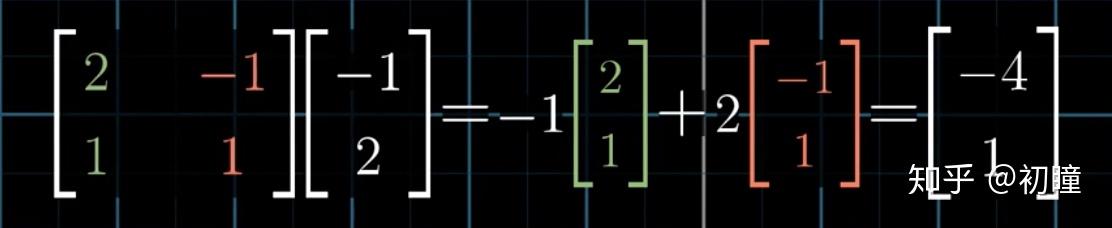

特别的,这里 \begin{bmatrix} 2&-1 \\ 1&1 \end{bmatrix} 就意味着是 \vec{b_1},\vec{b_2} 在\vec{i},\vec{j} 表示下的基坐标。

9.3 基向量变换
关于下面的介绍到提到詹妮弗做简单的说明
- 将 \vec{b_1},\vec{b_2} 构成的空间网格称为 "詹妮弗的网格(Jennifer's grid)"
- 因为 \vec{i},\vec{j} 构成的是标准空间,因此构成的空间网格为“我们的网格(our grid)”
首先,将 \vec{i},\vec{j} 基向量变换为 \vec{b_1},\vec{b_2} 基向量 【正变换】
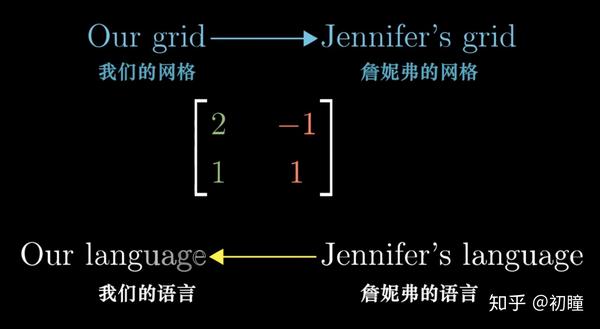

特别的,❤️几何上表示的是这个矩阵是将我们的网络变换为Jennifer的网络,但是数值上是将Jennifer的语言用我们的语言来表示,相当于这个矩阵是基于 \vec{i},\vec{j} 来表示的❤️【这里很容易理解错误】
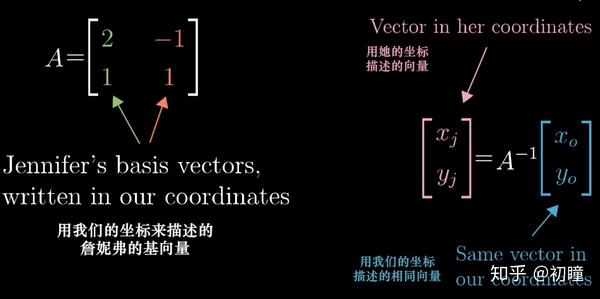
其次,将 \vec{b_1},\vec{b_2} 基向量变换为 \vec{i},\vec{j} 基向量 【逆变换,它是一个新的变换,将对应的变换逆向进行。】
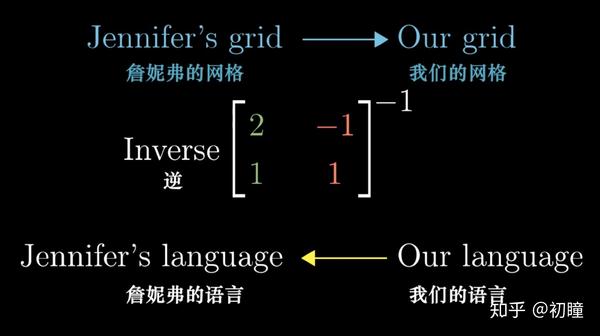

特别的,❤️几何上表示的是这个矩阵是将Jennifer的网络变换为我们的网络,但是数值上是将我们的语言变成了Jennifer的语言,相当于这个矩阵是 \vec{b_1},\vec{b_2} 来表示的❤️
9.3.1 基向量变换距离说明


继续开始的举例:
\begin{bmatrix} 3 \\ 2 \end{bmatrix} 是在基向量 \vec{i},\vec{j} 的表示结果,\begin{bmatrix} 5/3 \\ 1/3 \end{bmatrix} 是在基向量 \vec{b_1},\vec{b_2} 下的表示结果,两者实际是同一个向量,只不过是在不同基坐标系的表示结果。
那么如何将 \vec{i},\vec{j} 基坐标系表示的向量用 \vec{b_1},\vec{b_2} 的向量来表示:


9.4 不同坐标系之间的变换
9.4.1 变换依赖基向量的选择
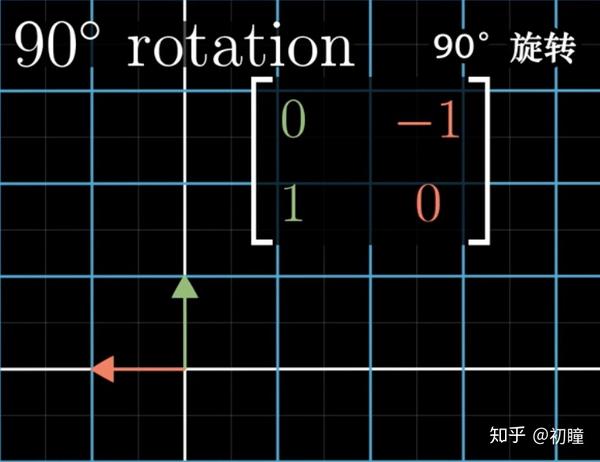
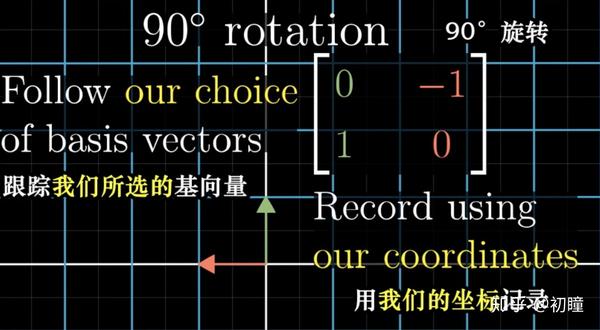
线性变换、矩阵乘法、逆时针旋转90度坐标系,这种表示与我们所选择的基向量有关。

就是需要跟踪我们所选择的基向量,用我们的坐标记录来记录变换后的坐标位置。

那么我们来看, \vec{b_1},\vec{b_2} 坐标系逆时针旋转90度。
在此我们不应该去利用 \begin{bmatrix} 0&-1 \\ 1&0 \end{bmatrix}来进行变换,因为这个变换是在追踪\vec{i}=(1,0),\vec{j}=(0,1) 得到的,而需要的找到基向量 \vec{b_1},\vec{b_2} 变换后的位置,也就是需要在 \vec{b_1},\vec{b_2} 对应坐标系下最终它的基向量位置的变化结果。
9.4.2 不同坐标系之间的变换
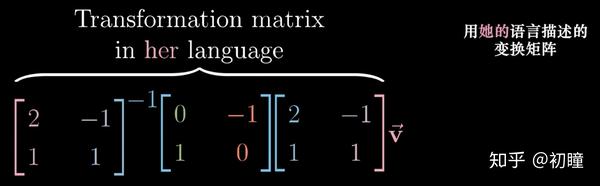

这个表示的是 对于 \vec{b_1},\vec{b_2} 空间中的向量 \vec{v} 进行旋转90°变换后的结果,
抽象为: A^{-1}MA\vec{v} 最终结果表示的 \vec{v} 所在的空间中变换 M 后的结果。
特别的, A^{-1}MA 暗示一种数学上的转移作用,中间的矩阵 M 代表一种标准坐标系下常见的的变换(旋转变换,剪切变换等); A^{-1},A 代表转移作用,也就是在不同于标准坐标系与标准坐标系之间进行转换, 实际上也是视角上的转化。矩阵乘积代表着同一种变换,只不过是从别的坐标系的角度来看。
具体过程如下 :
我们以 \vec{v}=\begin{bmatrix} -1 \\ 2 \end{bmatrix} 为例
- 先将其转化为 \vec{i},\vec{j} 空间中的向量,也即乘以矩阵 \begin{bmatrix} 2&-1 \\ 1&1 \end{bmatrix},

- 将其旋转90°,即乘以矩阵 \begin{bmatrix} 0&-1 \\ 1&0 \end{bmatrix}
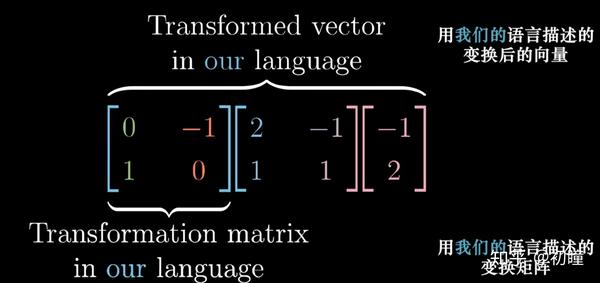

- 这样我们将旋转变换后的结果在变回 \vec{b_1},\vec{b_2} 空间中的向量,即乘以矩阵 \begin{bmatrix} 2&-1 \\ 1&1 \end{bmatrix}^{-1})


9.5 总结
❤️❤️❤️ A^{-1}MA 暗示一种数学上的转移作用,中间的矩阵 M 代表一种标准坐标系下常见的的变换(旋转变换,剪切变换等); A^{-1},A 代表转移作用,也就是在不同于标准坐标系与标准坐标系之间进行转换, 实际上也是视角上的转化。矩阵乘积代表着同一种变换,只不过是从别的坐标系的角度来看。
❤️❤️线性变换依赖于所选择的基。
为了方便理解,将总结前后copy了一份,与9.0章节的内容保持一致。
题图来源于:https://www.ics.uci.edu/~xhx/img/courses/linearalgebra.png
内容及图片来源:
