如何评价新出的YOLO v4 ?
54 个回答

很荣幸也很尴尬地做了一个和YOLO v4 中的Mosaic技巧部分撞车的工作,吓得我赶紧把我们的工作放出来。
- Stitcher: Feedback-driven Data Provider for Object Detection
在这个问题下面和大家分享一下我们的工作,正好解释一下我们和YOLO v4 - Mosaic的区别与联系,以及这种类似的做法为什么能涨点,以及其他可以挖掘的点。
- Motivation
去年打COCO比赛的时候,我负责研究detection的training方式,当时尝试了Multi-scale training的各种settings、SNIP[1]/SNIPER[2]、CSN[3]等。发现Multi-scale training对模型训练是真的很有帮助,即使在接近50 AP的高baseline上还有不俗的提升。然而,普通的Multi-scale training太低效了,而SNIPER是真的复杂,需要处理好label assignments, valid range tuning, positive/negative chip selection,费了我们很大的力气才把它从MXNet源码迁移到我们自己的框架上。这样的心态和需求,迫使我们去研究一种更简洁实用的multi-scale training 方法。
不管是普通训练还是Multi-scale training,我们发现在COCO上训练出来的模型,小物体的AP永远是比中物体和大物体低很多。比如,在最常用的baseline: Faster R-CNN + ResNet 50-FPN (1x) 的结果(AP: 36.7 %, AP small: 21.1 %, AP mid: 39.9 %, AP large : 48.1 %)中,AP small 比 AP large 低了两倍还多。接下来,我们就开始研究,小物体到底出了什么问题,以及怎样解决这样的问题。
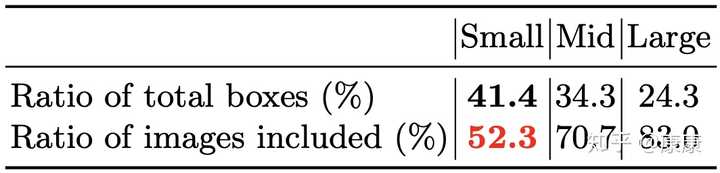
首先,我们统计了小物体在数据集中的分布,发现训练集中小物体的数量并不少。如下表所示,在所有boxes中,有41.4 %是小物体,是这三类物体之中最多的;但小物体的分布却非常不均匀,只有52.3%的图片中包含了小物体,而中物体和大物体分布都相对均匀。换句话说,小物体数量很多、但分布非常不均匀,有接近50%的图片中都没有小物体。

接下来,我们又统计了一下,在训练过程中小物体的loss分布。能直接反应模型学习情况的是loss,进一步发现,还是在这个Baseline: Faster R-CNN + ResNet 50-FPN (1x)的训练过程中,有超过50% iterations中,小物体所产生的loss都非常低(不到总loss的0.1)。这说明在模型训练过程中,小物体提供给网络的监督是不足的。


通过上述分析,我们的猜疑链形成:数据集中小物体分布不均匀 --> 训练中小物体学习不充分(Loss不足) --> 训练完的模型小物体精度差。而接下来就是按照这个逻辑逐步设计解决方法。
- Method
在已经有了前面multi-scale training和SNIPER的实验结果后,我们想到可以把图像缩小,并拼接在一起(逆SNIPER而行,SNIPER是裁剪,Stitcher是拼接)。如下图所示,我们把batch内每4张图都缩小到同样大小,之后拼成一张与正常普通同样大小的图作为训练。通过这样的方式,把大物体和中物体缩小成中物体和小物体,来均衡不同Scale物体在训练过程中的分布。


(这里与YOLOv4-Mosaic类似,但不同的是我们没想到拼接的时候可以调整4张图为不同大小。 )
接下来就是紧张刺激的实验环节,完全采用这种拼接图进行训练,在上文36.7% 的baseline上得到了32.1%的惊人结果。 然而,就算在32.1% 的 AP 中(AP small: 21.9, AP mid: 36.4, AP large: 36.8)的AP small仍然比36.7% 的baseline中的AP small要高,这让我们看到了希望。这说明,拼接图是有用的,只是我们没用好,所以影响了最终效果。
前面对训练过程中loss的分析,给我们提供了一个自然而然的思路,就是直接用loss 作为反馈信号,来指导拼接图的使用。我们采用了一种“缺啥补啥”的简单思路:如果上一个iteration中,小物体产生的loss不足(比例小于一个阈值),则下一个iteration就用拼接图;否则就用正常图片训练。这个思路将32.1%的结果一下子增长到了38.6%,且统计loss比例几乎不需要额外的计算量。


- Experimental Results
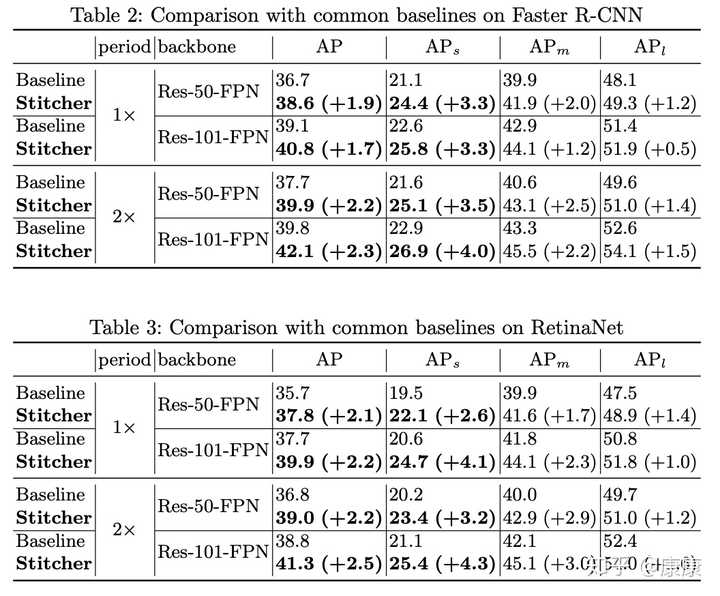
(1)我们在Faster R-CNN、RetinaNet的1x / 2x上都进行了实验,有2个点左右的AP提升,且涨点主要来自于AP small。这符合我们最初的Motivation和方法设计。
(2)此外,我们还在更大的backbone / 更高的baseline (ResNext + Deformable) 、其他数据集 (PASCAL VOC)、Instance Segmentation (Mask R-CNN) 等settings上都做了实验验证,都有不同程度的效果提升。

- Further Analysis
除了常规实验以外,还有一些其他的效果分析可供讨论。
1. 只能4张 (平方数) 拼接吗?
答案是否定的。
不管是我上文介绍的拼接方式还是YOLO v4,都是在Spatial维度 (h,w)上进行拼接的。如下图(c)中所示,本文还提供了一种在batch维度n上拼接的等价的实现方式,也能达到一样的效果。
这样的做法可以带来如下好处:
(1) 拼接图像的数目不再需要因为spatial的限制局限于平方数,可以自由选择2、3、4、5、6等张数图像进行拼接。
(2) 对于那些读写内存有限制的训练设备平台,提供了一定的自由度。




2. 过拟合问题(更长训练时间的增益)
在后续实验中,我们还发现Stitcher可以起到防止过拟合的作用。在不用SyncBN之类的骚操作的情况下,把一个最普通的Faster R-CNN + FPN模型直接训练时间较长(6x)是会有严重的过拟合的(36.7-->35.6),但Stitcher却没有这个问题。因为在Stitcher训练过程中,拼接图像的挑选组合是随机的,拼接图像的多样性防止了过拟合的发生。


3. 计算量代价
(1)对于Inference阶段,Stitcher 没有做任何修改,不需要调multi-scale testing之类的操作。所以,如果使用者只关心Inference time 的话,Stitcher带来的涨点可以说是完全免费的。
(2)对于Training阶段,Stitcher 额外引入的操作包括:image stitching 和 loss ratio calculation这两步。经实测,后者可以忽略不计,额外的耗时集中在于前者对图像的interpolation. 我们在同一台 8 GPUs RTX 2080 TI 的机器上实测,对于Faster R-CNN + ResNet 50 + FPN的baseline上,加上Stitcher需要额外多训练15分钟左右。这相比于8个多小时的训练来说,多等15分钟也是可以接受的。
- Conclusion
总结一下,我们这篇工作从小物体精度低这个问题入手分析,提出了一种新的multi-scale training方式 Stitcher,在常用的数据集、检测器、训练方式上均涨点明显,没有引入任何Inference负担,有一定的简洁实用性。代码和模型都会在近期开源。 - 欢迎各位大佬对我们的文章提出意见建议!
参考
- ^An Analysis of Scale Invariance in Object Detection - SNIP http://openaccess.thecvf.com/content_cvpr_2018/papers/Singh_An_Analysis_of_CVPR_2018_paper.pdf
- ^SNIPER: Efficient Multi-Scale Training https://papers.nips.cc/paper/8143-sniper-efficient-multi-scale-training.pdf
- ^Consistent Scale Normalization for Object Recognition https://arxiv.org/pdf/1908.07323.pdf

很有价值但没有什么太大的意思,试了很多trick,最后选了一组最优的,相当于帮工程师试了一遍错。其实适用范围有限,工作中用到的数据集很多都是奇奇怪怪的,你怎么就知道这文章的结论适用你的数据集呢?像giou diou, ciou啥的,最后自己还是会亲自试的。
而且这已经不是Yolo系列的风格了,没什么好激动的,甚至让人感到失望。
为啥Yolo这么多人喜欢,工业界用的多(不出意外,应该是最多的),不是因为什么精度速度trade off 最优,比Yolo更快更好的模型多了去了,无数轻量级网络都是以YoloV3为base line的,不打败YoloV3都不好意思发论文。但工业界用的最多的还是YoloV3,主要原因还是简洁。
所谓的简洁,就是结构简单,一眼就懂,随便哪个框架,哪怕caffe 1.0都能顺手写出来。一路conv max pool relu到底,通透。随便接个自己的数据一跑都能work,想要改大改小都很简单。
这感觉很过分,但很多时候都是不得已的,工业界使用的硬件五花八门,各自有各自的支持范围。但无论哪个硬件,他们一定会支持Yolo,Yolo就是所有硬件的交集。你比如一个推销FPGA的厂商要来演示,肯定会演示Yolo,能跑这个,就算保底了,客户也也就没那么多废话可问,Yolo嘛,大家都能背的。
虽然已经2020了,很多硬件都是不支持depth wise conv的,甚至还有硬件只支持relu这一种激活函数的。没有sigmoid,那Attention相关的都可以不用想了。最近新出来的各种激活函数也不用想了,dilated conv是不可能的,什么,你还想Deformable和dynamic conv?怕不是在做梦吧?
所以这个新的Yolo v4,很多工程师大概率就是跟我一样了,极其兴奋的打开论文,然后心越看越凉。。。紧跟时代用新版Yolo秒杀客户的企图就这么泡汤了。。。最终,大家的demo仍然会定格在Yolo V3,然后根据硬件的需要魔改一番。Yolo如果放弃了他简洁通透conv到底的特点,和其他各路检测框架就没区别了,泯然众人矣。
不过有一说一啊,文章本身还是很好的,肯定要细细研读,这对我而言就是目标检测的trick综述,而且还有很多训练端的方法可以用,许多trick我之前都不知道…